Exercise 1:
Arduino Function Call Glossary:
- celerate(m,p1,p2,t);
- The motor (m) accelerates over the time (t) from the beginning speed (p1) to the final speed (p2).
- motorSpeed(m,p);
- Set the motor (m) to the speed (p).
- goFor(t);
- Keep the previous command going for the time (t).
- brake(m);
- Stop the motor (m).
- reverse(m);
- Reverse the spinning of the propellers for motor (m).
- goToRelativePosition(n);
- Keep the motors going until
- goToAbsolutePosition(n);
Exercise 2:

The purpose of the reflectance sensors is to communicate how far the AEV has traveled across the track by keeping track of how many times the wheels spin. This distance is measured in marks and helps the team create code that results in high consistency.
Exercise 3:



Designs 1, 2, 3, and 4, respectively.
Design 1:
Design 1 was created with stability in mind. The balance and construction of the design add to the stability by lessening the rocking of the vehicle as it traverses across the track.
Design 2:
Design 2’s main focus was to optimize the aerodynamic abilities of the AEV. The body of the AEV is built in a sleek pointed construction that allows the vehicle to move with little wind resistance. The simplicity of the design would also result in a smaller amount of money being spent, therefore being budget friendly.
Design 3:
Design 3 was also built taking aerodynamics into consideration. The body of the AEV is in a smooth bullet-like shape that lessens the wind resistance. The AEV design also results in a lighter builder that would require less energy to use, therefore also being cost efficient.
Design 4:
Design 4 was yet again another AEV designed to be very aerodynamic. The thin frame of the AEV was intended to decrease the surface area of the AEV being slowed by air resistance. The symmetrical design of the vehicle also adds to the balance and stability so the AEV does not fall off the track or excessively rock.

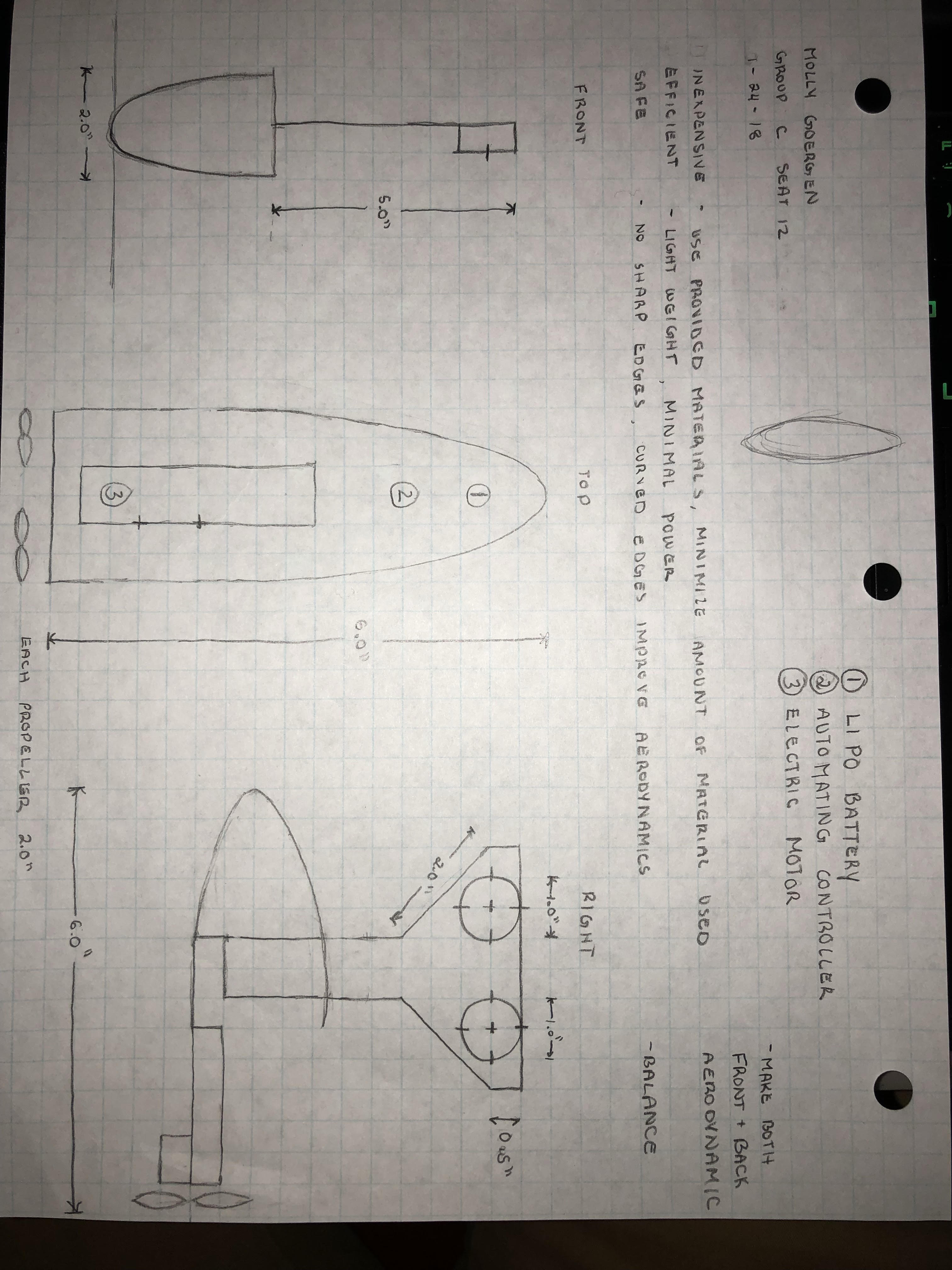
Final Team Concept Sketch:
The focus of the combined group sketch was to optimize the AEV in more areas than just one in order to have the most cost and energy efficient vehicle. The AEV was designed wit minimal parts in order to make the chassis very light. It is also designed in a vertical orientation to incorporate aerodynamic qualities. Lastly, the arduino and battery are situated on opposite sides of the vertical arm in order to balance out the AEV and contribute to the overall stability.
Exercise 4:

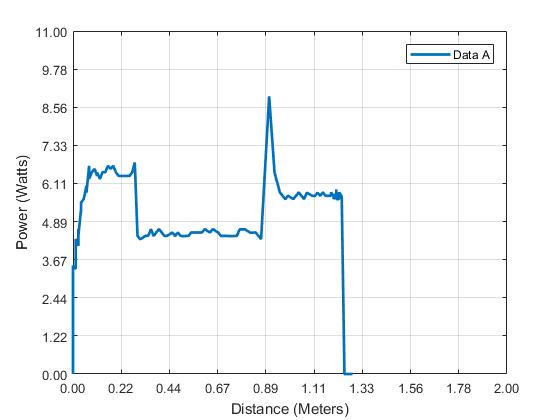
For the first three seconds, the motors are accelerating. After that, the motors continue on the tracks at a constant speed for 1 second. Next, the motors are ran at a constant speed for two seconds, the motors are reversed, and the motors continue at a constant speed for another 2 seconds. Lastly, all the motors are brakes and the AEV comes to rest.
Exercise 4 Code: CSS1
// Reverse all motors for initial orientation
reverse(4);
// Accelerate all motors from start to 25% in 3 seconds.
celerate(4,0,25,3);
// Run all motors at a constant speed for 1 second.
motorSpeed(4,25);
goFor(1);
// Run all motors at 20% power for 2 seconds.
motorSpeed(4,20);
goFor(2);
// Reverse all motors.
reverse(4);
// Run all motors at a constant speed for 2 seconds.
motorSpeed(4,25);
goFor(2);
// Brake all motors.
brake(4);
Exercise 5:
| Concept Scoring | ||||||
| Design | 1 | 2 | 3 | 4 | 5 | 6 |
| Stability | 2 | 3 | 4 | 2 | 2 | 4 |
| Blockage | 2 | 4 | 2 | 3 | 5 | 4 |
| Maintenance | 1 | 1 | 3 | 2 | 2 | 2 |
| Durability | 2 | 2 | 1 | 2 | 4 | 3 |
| Safety | 4 | 5 | 2 | 4 | 4 | 3 |
| Total | 11 | 15 | 12 | 13 | 18 | 16 |
| Continue | No | No | No | No | Develop | Develop |
| Concept Screening | ||||||
| Design | 1 | 2 | 3 | 4 | 5 | 6 |
| Stability | – | 0 | + | – | – | + |
| Blockage | – | + | – | 0 | + | + |
| Maintenance | – | – | 0 | – | 0 | – |
| Durability | – | – | – | 0 | + | 0 |
| Safety | + | + | – | + | + | 0 |
| Net | -3 | 0 | -2 | -1 | 2 | 1 |
| Continue? | No | No | No | No | Develop | Develop |
The following are the criteria on which the designs are based on equally.
Stability – AEV must have a decent center of gravity and cannot place too much weight on small parts
Blockage – AEV must not interfere with the track that is it on
Maintenance – AEV must be set up quickly when taken out of box
Durability – AEV must be structurally sound
Safety – AEV must not easily fall of the track or fall apart
The group’s has decided to minimize weight and drag by creating a vertical design. The weight of all necessary parts will be evenly distributed.