INDIVIDUAL AEV MODELS
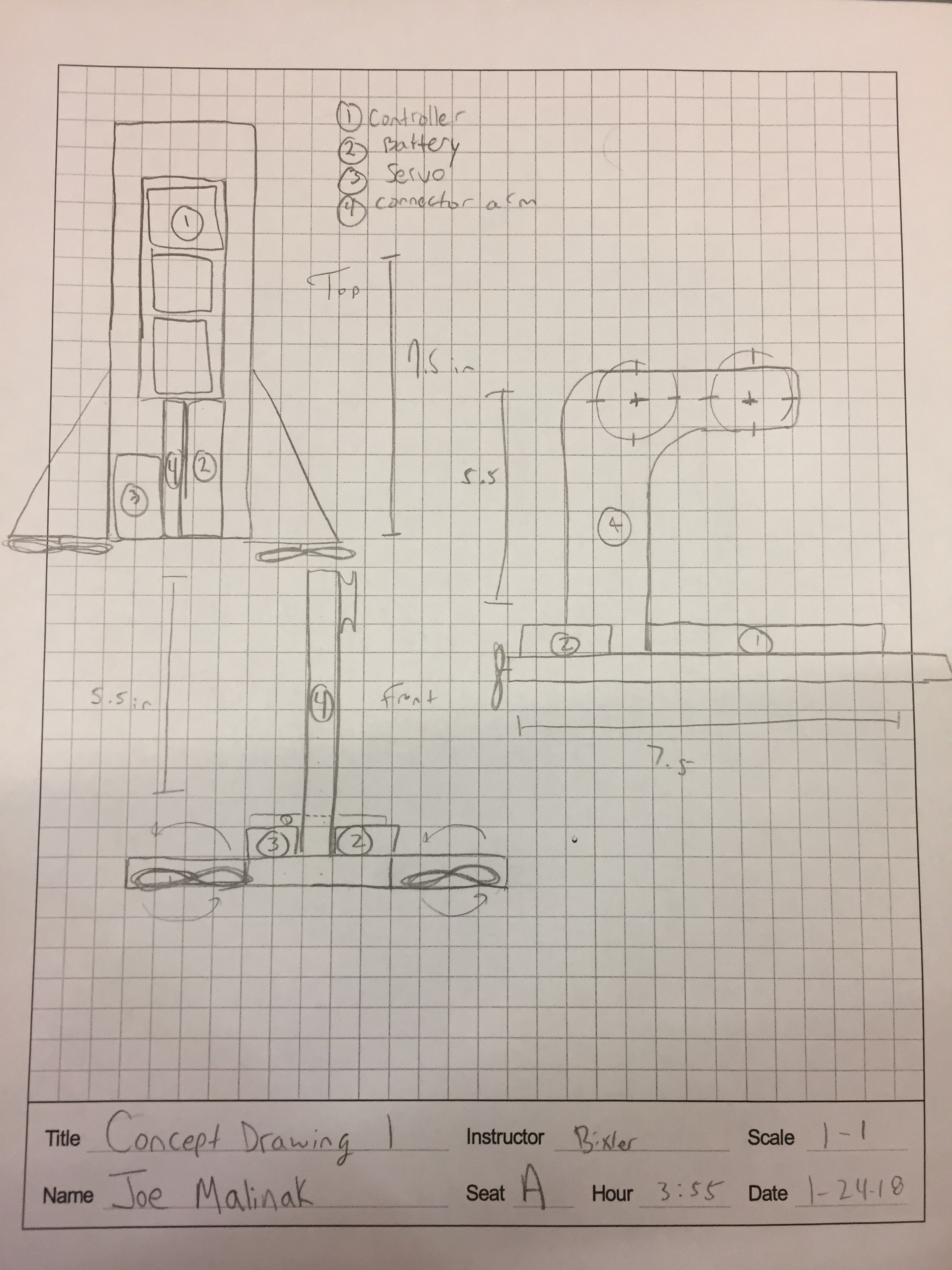
Joe’s Concept drawing has the propellers jetted out in order to catch more air. The battery is located to the right of the arm to provide stability during right handed turns. The controller is in the middle for easy access for plugging wires in. The servo is on the left of the arm because it is light and wont affect stability much. A problem may be that the weight is all located in the rear.

Jordan’s Concept drawing has the battery located under the base and towards the front of the AEV to balance out
the weight from the motors and Arduino. The wings are attached closer to the center in the design to make it more stable.

Tyler’s deign is slightly different than the other’s because the wings on the outside are folded up to a 90 degree angle. The thought process is to make it more aerodynamic but I think the negative aspect is that it might catch more wind. Also, the design is very stable because it is condensed and not as wide, but since everything is so close, the safety is worse.
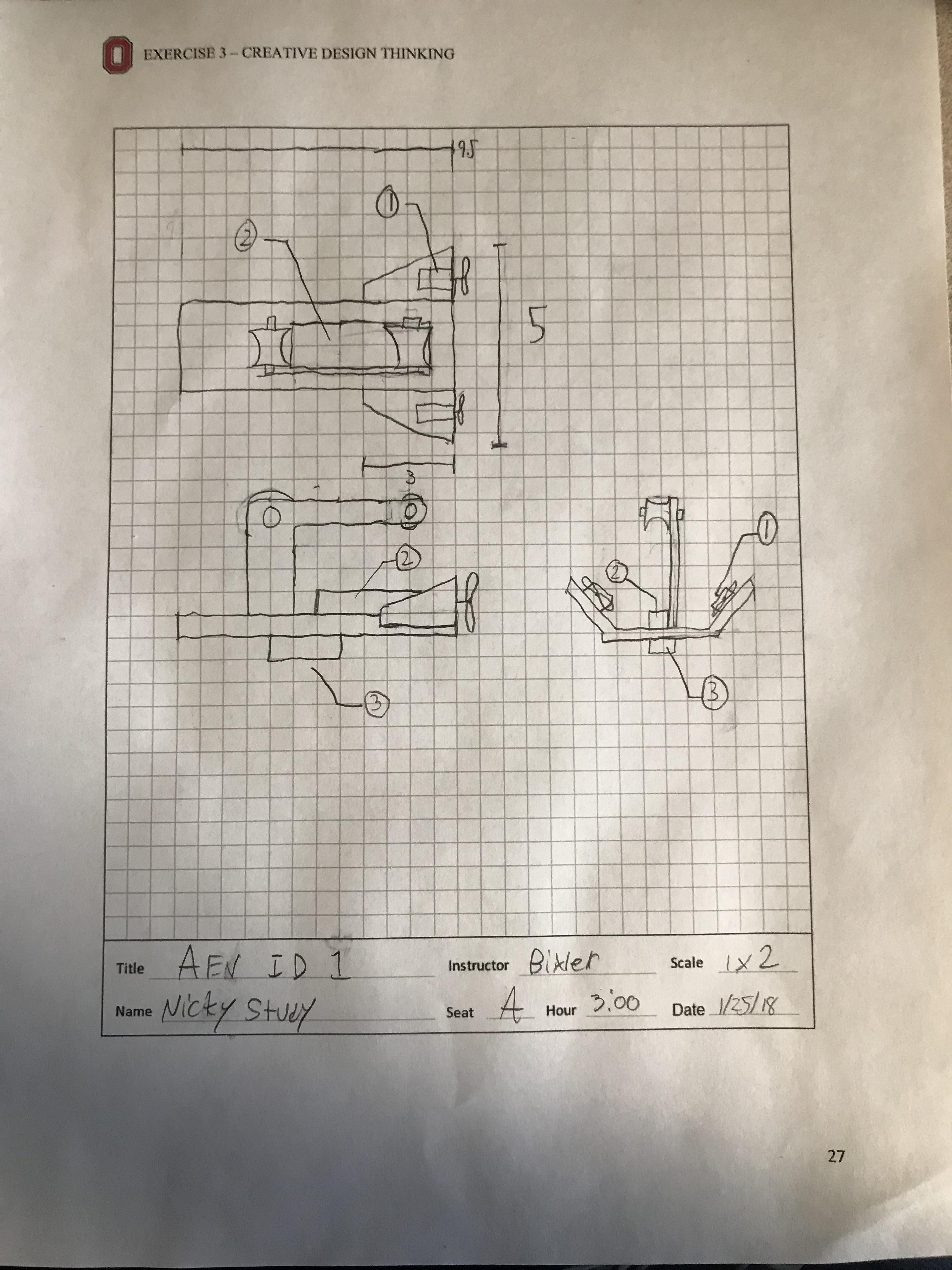
Nicky’s design for the AEV incorporates 45 degree angles on the plates that hold the electric motors to raise the center of thrust to be closer to the center of mass to help with thrust efficiency.
TEAM AEV MODEL

The team constructed an AEV based off of Jordan’s model. The battery is situated under the base for stability. The controller is centered. The motors are jutted out at a 0º angle in order to keep the thrust low and catch more air. The arm is also centered as much as possible. The team utilizes two, 3 inch propellers.