Website Deliverables
Exercise 1
- Create a glossary of the Arduino function calls (with similar content to the Basic Function Calls table in the Background section) and include it on your webpage so viewers unaccustomed to programming will be able to understand your code.
Answer:
Arduino Basic Function Glossary:
Celerate: This function use for Accelerate or decelerates the motor from start speed to end speed over a duration of time.
MotorSpeed: Initializes motor at percent power.
goFor: Runs the motor at their initialized states for seconds.
Brake: Brake motor. However, it does not brakes the AEV,but just stops the motor from spinning.
Reverse: Reverses the polarity of motors.
goToRelativePosition: Continues the previous commands for marks from the vehicle’s current position. Mark can be positive and negative, with positive that mean vehicle moving forward, and negative meaning the vehicle is moving backward.
goToAbsolutePosition: Continues the previous commands for marks relative to overall starting position of the AEV.
Exercise 2
- Describe the function of the reflectance sensors and their importance in completing the MCR.
Answer:
The function of the reflectance sensors:
MotorSpeed(m,p) (Run motor with certain percentage of power for certain time)
goFor(t)
MotorSpeed(m,p) (Run motor with certain percentage of power for certain distance)
goToAbsolutePosition(d)
reverse(m) (backward the motor)
motorSpeed(m,p) ( Run motor with constant speed for certain second)
goFor(t)
brake(m) ( Brake all motor)
The importance of reflectance sensor is it keeps track of the distance that AEV travel using the reflective measurement tape on the wheel. It also record the marks which is valuable to user. If the sensor is not closed enough it would not provide good signal.
Exercise 3
- Upload all individual concept sketches as well as the team concept sketch.
Answer: Refer to Evolution of Design
- Include explanations behind sketches. Explain why that idea would be successful in completing the scenario.
Answer:

Indra AEV : That sketch will or will not be successful because it not well dimension and it was drawn in different graphing sheet. If this drawing is drawn in regular sheet and includes dimension than it have chance to become successful in future.
Jack AEV: The sketch uses the same basic design as the Sample AEV. Crucial electronic parts will be fixated to the top and bottom. A shell resembling the front of a bullet or airplane makes the AEV aerodynamic. The shell cuts off before the end to conserve weight.
John AEV: The sketch of this design focuses on improving two things: Aerodynamics and Power. I added two more motors and based the body off of an airplane which will potentially allow it to travel efficently and rapidly.
Ron AEV: The sketch is based off of the first AEV that we assembled. The two motors are to be placed near the center of mass and the electronic parts are distributed along the top in a way that allows for the AEV to sit not on an angle. I did not include an aerodynamic covering to see if saving weight would be a greater benefit than being aerodynamic at the low speeds. Also, the servo motor is used in this design as a break by applying pressure to one wheel when activated.
Exercise 4
- Provide the following figures and tables: (A plot of Power vs. Time) (A plot of Power vs. Distance) Note: Use the “Export Figure” (see Lab Activity for this feature). Do NOT use Snipping Tool or ALT/CTRL + Print Screen. These features make the figure distorted and not professional. “Export Figure” is to make the figure nice and clean.
Answer:

- Provide an explanation for the figures and what they are representing (Hint: refer to the Arduino Code).
Answer:
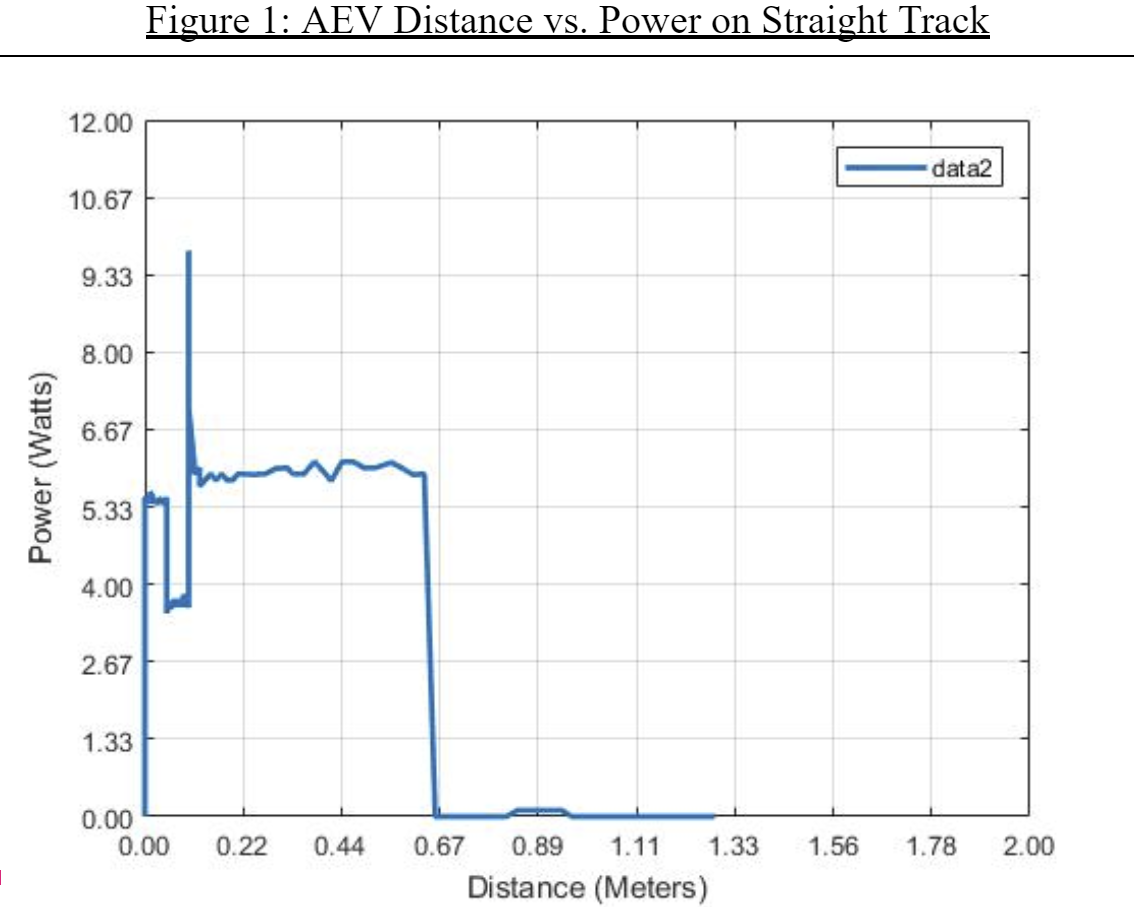
AEV Power vs. Distance,
In figure 1, the performance analysis of AEV was taken using straight track code. As we can see, from 0 to 0.1 meters with constant power, the inertia of AEV cause motor not to move until the certain force was exterted on propellor.After few seconds, motor speed hits the propellor and the motor start to move to certain distance by looking at figure 1. When motor speed stops at 0.67 meters power become zero and coast for certain distance.
AEV Power vs. Time
In figure 2, using straight track code performance anaylsis of AEV was construct to anaylized the design decision making process. From 0 to 2.7 second motor start to accelerate with certain power, then it continue to move with same speed for about 1 second. At 4 second, motor sligthly decrease in speed and then continue to move with given motor speed for 2 second. After this, AEV reverse from 6 to 6.3 second and then motor continue to move with given speed for certain second before brake all motor. After braking the AEV, it coast for certain second.
Exercise 5