
 Power Braking v. Coasting
Power Braking v. Coasting
- Energy consumption – power braking consumes more energy compared with the coasting method.
- Distance in which the AEV comes to rest – power braking takes less time to rest than coasting.
We tested the AEV with both braking methods until results become consistent, and using the data collected from the AEV, plotted the two kinds of figures using Matlab: Power (Watts) vs. Time (seconds) and Power (Watts) vs. Distance (Meters). We also wanted to find how the reverse command in coding influenced the power of motors because this significantly affects the control for the AEV.
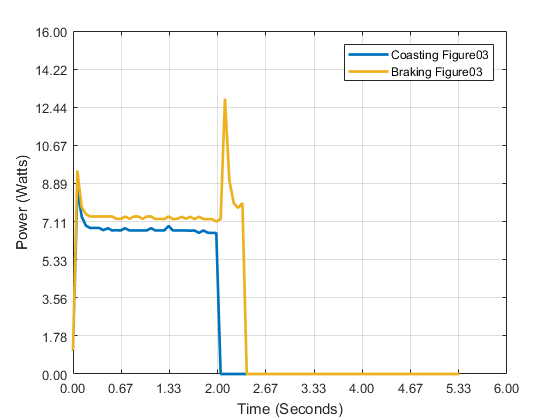
Figure 1: Power (Watts) vs Time (seconds)
In Figure 1, the areas under their respected curves represent the work (Watts) done by the motors. We can compare the areas of the two curves to determine which process is more efficient (consumes less energy). From the figure, the work done during power braking is observed to be greater than that done during coasting. Therefore, it can be concluded that power braking is less efficient than coasting because it consumes more energy.

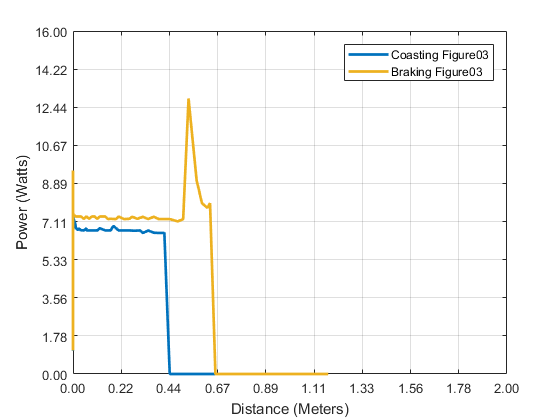
Figure 2: Power (Watts) vs Distance(seconds)
In Figure 2, the slopes in this figure represents impulse (the change in momentum), which can reflect the effect of the force acting on the motors over time. For the power braking curve, there is a sudden change in impulse at approximately 0.45 meters away from the initial position. This is when the AEV motors reverse their direction. As can be observed from the figure, the AEV comes to rest at a shorter distance (approx. 0.89 meters) when power braking than when coasting (approx. 1.22 meters). It can be concluded that power braking allows the AEV to come to rest faster.
The power braking method, even though it requires more energy, is favored over coasting because it offers greater control over the AEV by shortening the braking distance obtained by coasting. The control for AEV’s motion is essential because it not only reduces the time taken for the final run, but also creates more accurate results.
AEV Arduino Code:
// Coasting code
// reflectanceSensorTest();
//Run all motors at a constant speed of 30% power for 2 seconds.
motorSpeed(4,30);
goFor(2);
//Brake all motors.
brake(4);
// Braking code
// reflectanceSensorTest();
//Run all motors at a constant speed of 30% power for 2 seconds.
motorSpeed(4,30);
goFor(2);
reverse(4);
motorSpeed(4,30);
goFor(0.3);
//Brake all motors.
brake(4);