Image
The reflectance sensors secured to the AEV are shown below:
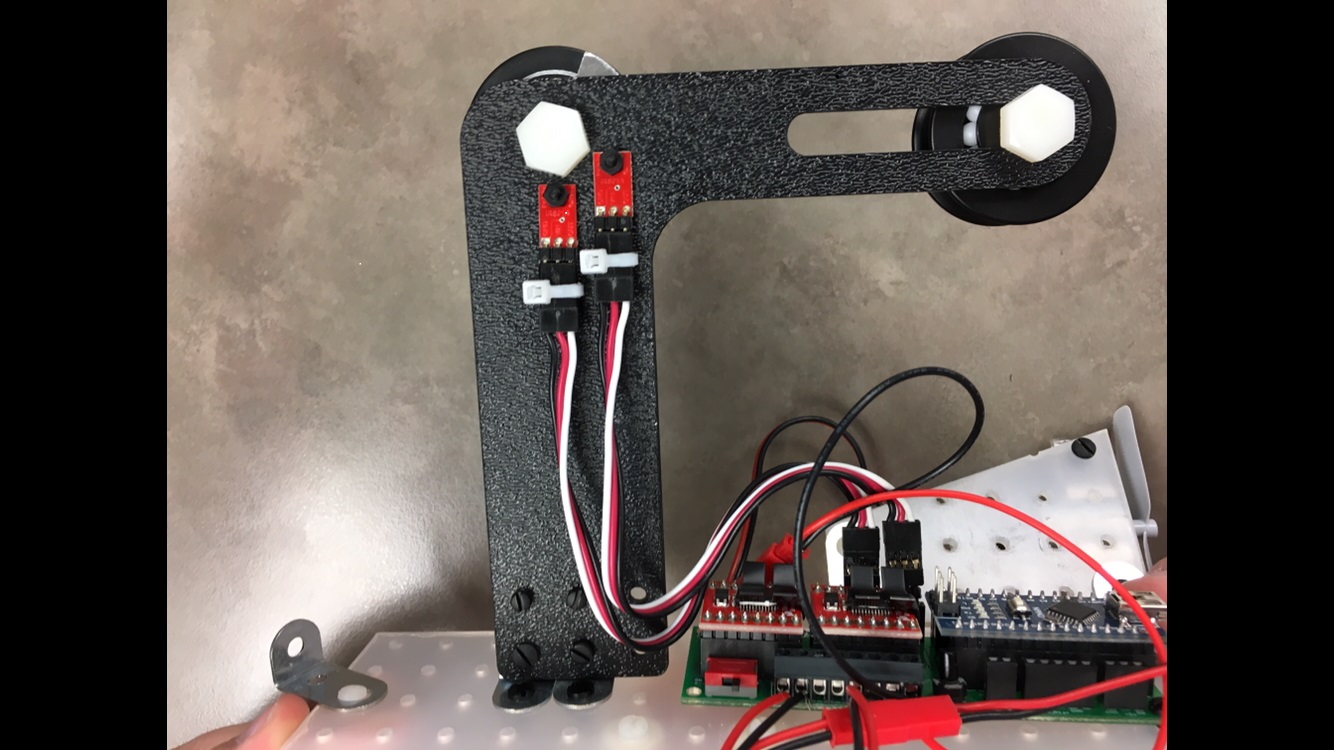
Function
In order to control how far the AEV travels once the Arduino is running, it is necessary for the AEV to know its location and the potential distances it can travel, as described by the MCR. The reflectance sensors will serve as the primary guide for the AEV to the correct stopping locations. Such distances are obtained by the marks on the reflectance sensors, each of which correspond with 0.4875 inches. By using the marks as a distance metric, the team can use the reflectance sensors to guide the AEV into moving into and stopping at the correct locations.