The Data Analysis Tool lab provided the team with a background of the MATLAB based data analysis that allows the team to extract data from the AEV and retrieve measurements such as time, current, distance, total distance traveled, position, speed, power, and energy based off each run and turn them into graphs and tables. In addition to this, the lab also provided the team with the nohow to use the data analysis tool and even had the team take a task, turn it into code, run the test with the Advanced Energy Vehicle, and then extract the data using the Data Analysis Tool and create tables and graphs out of the data that was extracted. The extracted data is shown below:
Input Power vs Time
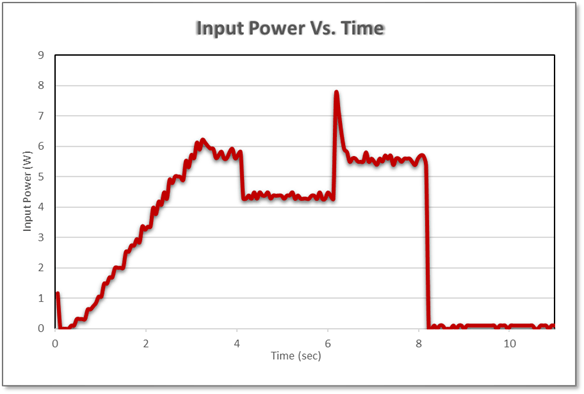
This graph represents the amount of power that was used at during the data analysis during the time of the testing. The graph directly shows how the code ran by first showing the steady increase of power usage over the first 3 seconds as the AEV accelerated to 25% power. Afterwards, there is a drop in power usage to a constant rate for 2 seconds as the AEV dropped to a constant 20% power. Then, there is a spike up to a constant power usage as the AEV increases it’s motor power to 25% for the next two seconds. Finally, there is an immediate cut of power usage for the “break” command completely cutting the power to the motors.
Power vs Distance

At first, there is a large spike in the power usage with no distance actually covered, for the AEV was unable to move until as it accelerated until it nearly reached 25% power to the motors. Then, when the AEV dropped to 20% power to the motors there was still little to no movement, causing the vertical line yet again. Once the AEV finally began moving in reverse, the AEV finally managed to move a considerable distance to register as a nearly horizontal line. Finally, there is a drop in the powers but a continuation in distance as the AEV cut the power to the motors but coasted for the remaining distance.
Energy vs Time

Within the first 4 seconds of the test, there is a visible curvature of increasing energy as the AEV began to accelerate to it’s 25% power. Then the graph shows a decrease to a steady incline for the next 2 seconds as the AEV was decreased to a constant 20% power to the motors. Afterwards, for the next 2 seconds after, there is a sudden increase to a steeping steady incline as the AEV went 25% power to the motors in the reverse direction. Finally, there is a distinguishable horizontal line that indicates when the “break” command cut all power to the motors for the remainder of the testing.
Energy vs Distance

At the very beginning of the graph, there is a noticeable increase of power with no change in distance causing a vertical line. This is due to how the AEV didn’t actually move for most of the time it was accelerating. However, there is a small portion which shows some movement between the two vertical points at the beginning which is when the AEV reached 25% power while accelerating and was able to move a short distance. Then, the proceeding vertical line indicates when the AEV dropped to 20% power and was unable to move. Afterwards, there is a steady incline of power to distance as the AEV was turned to 25% power in reverse and was successfully able to move. Finally, there is a horizontal line as the AEV continued to move with 0% power being supplied to the motors.
The examination of the resulting data revealed a few issues that might not have been at the primary concern of the group. First the drop off of efficiency in the motors early should be measured so as to find the optimal running range that still produces acceptable propulsion. Also, the motors have internal resistance and this resistance isn’t uniform in the motors. The use of gears could make it so the motors drive the same axle which in turn drives the propellers uniformly. Finally, the AEV had a notable tilt from the lack of proper weight distribution so care ought to be taken when orienting the parts to maintain balance of the craft and minimize any increases in friction the tilt might be adding.