Brake Testing was the first of two tests Group F performed to enhance the performance of the AEV. During this test, Group F changed the method of braking on the AEV to determine which type would be more energy efficient and also be able to control the AEV. After obtaining the results, the team determined which of the three methods should be implemented as the primary method of braking to stop the AEV. Each of the methods will be described below as well as the code that will be used to test them.
Testing
Coasting
In testing coast braking, a code was uploaded to the AEV. This code makes the AEV motors move at a constant speed for an exact distance and then stop. This caused the AEV to stop accelerating and coast until it comes to a halt. The code can be seen below:
| Code | Comments |
| motorSpeed(4,30); | run all motors at a constant speed of 30% |
| goToAbsolutePosition(98.46); | go to absolute position 98.46 marks (4ft) |
| brake(4); | brake all motors |
Power Braking
In testing power braking the testing procedure followed the same as coast braking. The code that was uploaded caused the motors to move at a constant speed and then when the target distance is reached, the motors were put in reverse to cause the AEV to stop. The code can be seen below:
| Code | Comments |
| motorSpeed(4,30); | Run all motors at a constant speed of 30% |
| goToAbsolutePosition(98.46); | Go to absolute position 98.46 marks (4ft) |
| reverse(4); | Reverse all motors |
| motorSpeed(4,30); | Run all motors at a constant speed of 30% |
| goFor(1); | Go for 1 second |
Servo Braking
In testing servo braking the testing procedure was followed the same as the other two methods. The code that was uploaded caused the motors to move at a constant speed. When the target distance is reached, a servo motor that rotated an arm was activated. This arm was attached to an eraser to come in contact with the wheel of the AEV to allow it to come to a stop. The code can be seen below:
| Code | Comments |
| motorSpeed(4,30); | Run all motors at a constant speed of 30% |
| goToAbsolutePosition(98.46); | Go to absolute position 98.46 marks (4ft) |
| brake(4); | Brake all motors |
| rotateServo(90); | Rotate the servo arm 90 degrees from it’s starting position |
Data
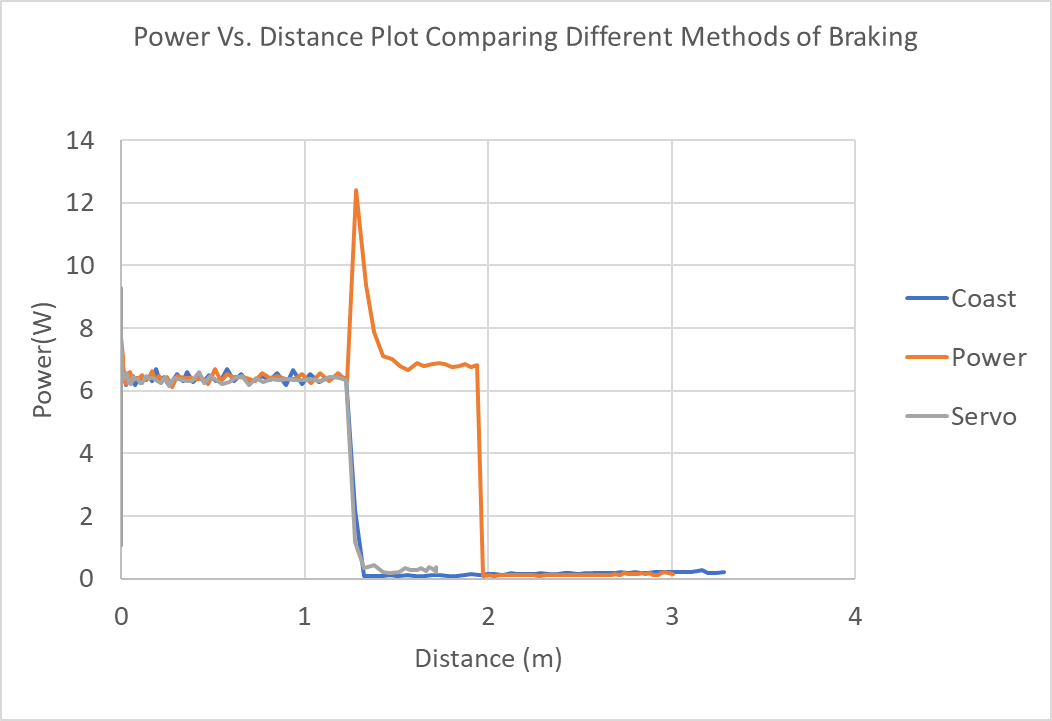
The figure below is a representation of data and averages of the test runs collected from three trials of coast braking, power braking, and servo braking.
Pros/Cons
Coast Braking
Pro
- The most energy efficient of the three types of braking
Con
- Provides no controllable way of braking the AEV
Power Braking
Pro
- Provides a very control way of braking
Cons
- Very inefficient compared to the other types of braking
- Requires more power in order to stop faster
Servo Braking
Pros
- Second most efficient way of braking the AEV
- Provided the AEV with the least amount of braking distance
- Very controllable and predictable
Cons
- Requires an extra motor added to the AEV
- Faster speeds make braking more unpredictable
Conclusions
Group F concluded that their AEV would be using the Servo Braking methods due to the low cost of energy and short stopping distance allowing for fewer crashes and better energy efficiency.