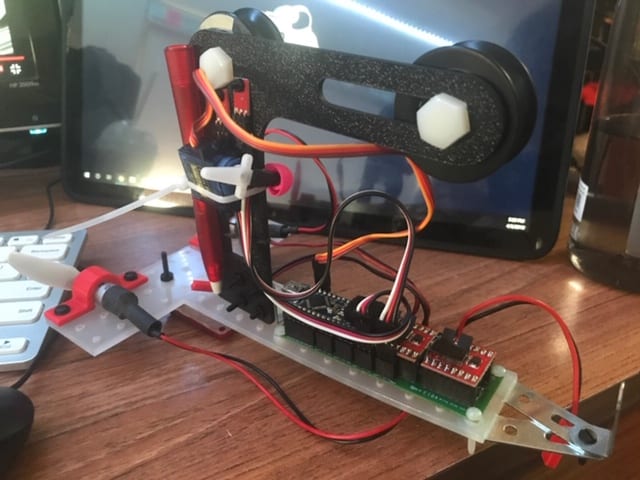
Throughout the Performance Tests, the team realized that power braking was not very accurate or efficient. Because of this, the team decided to test braking with a servo motor. The servo motor was attached on the arm of the AEV, right underneath the wheel. The team decided that the servo arm should swing up and touch the track instead of the wheel to stop the AEV. Electrical tape and a rubber earbud were placed on the servo arm to increase friction between the servo and the track, as indicated in the picture below.
Efficiency was tested by running the AEV without using the servo motor and using code from Performance Test 1, and then extracting data on power and energy used over time. The team then rewrote the code to fulfill the same constraints in Performance Test One, but using the servo motor instead of reversing the motors. Data was extracted and compared to the data from the tests without the servo motor.
Servo Data
Servo Power vs Time

Servo Motor Energy Table:
| Type of Test | Energy(J) |
| Not Servo Test 1 | 47.742 |
| Not Servo Test 2 | 47.247 |
| With Servo Test 1 | 28.579 |
| With Servo Test 2 | 28.304 |
Conclusions
The team concluded the servo motor makes the AEV considerably more efficient, as well as accurate in stopping. In the final performance test, the AEV used an average 148 joules and took 53 seconds to complete the test run.