In this test, the objective was to find the material that was the most efficient based off of tests that were done with a base AEV design. We tested each material by using the design and changing the base to each given material. The Materials that were given were wood (MDF), plastic (ABS), acrylic, and polypropylene. We had a base arduino code that we used for the materials and when ran the code would make the AEV travel forward on the given test track and then back to the start. The test track is flat unlike the real track. We then calculated the Energy used over the distance and placed them into graphs as shown below.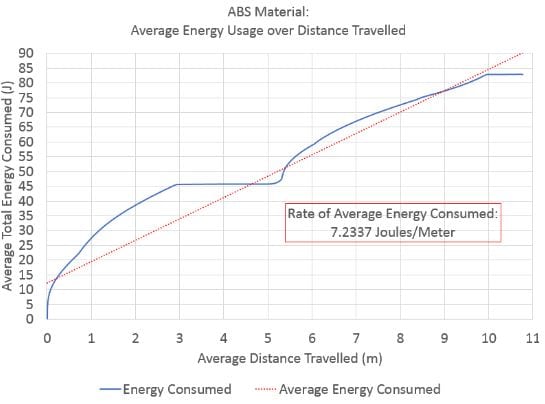
Energy used over a distance using the ABS material
In the first graph shown above, it shows the amount of energy consumed over a certain distance. This material was ABS. This material came out to 7.23 Joules Per Meter for the Average Energy used over a distance traveled.
Energy used over a distance using the acrylic
In the second graph shown above, it shows the amount of energy consumed over a certain distance. This material was acrylic. This material came out to 6.87 Joules Per Meter for the Average Energy used over a distance traveled.
Energy used over a distance using the MDF material
In the third graph shown above, it shows the amount of energy consumed over a certain distance. This material was MDF. This material came out to 8.85 Joules Per Meter for the Average Energy used over a distance traveled.
Energy used over a distance using the polypropylene material
In the last graph shown above, it shows the amount of energy consumed over a certain distance. This material was polypropylene. This material came out to 9.52 Joules Per Meter for the Average Energy used over a distance traveled.
Team B2 learned, based on the tables above, that Acrylic is the best material to use for the base of the AEV coming in at 6.87 Joules per Meter. Team B2 will be using this material for further testing and for our final design.
Code Used:
Refer here for information on command functions.
| Code | Explanation |
| celerate(4,0,30,4);
motorSpeed(4,30); goFor(4); |
All motors accelerate from zero percent power to thirty percent in four seconds. Then all the motors power output was set to thirty percent then is ran for four seconds. |
| motorSpeed(4,40);
goFor(4); brake(4); |
All motors’ power output is set to forty percent then in ran for four seconds. Then all motor power is stopped. |
| motorSpeed(4,0);
goFor(3); |
All motors’ power output is set to zero percent and is ran for three seconds. |
| reverse(4); | All motors’ rotation is reversed. |
| celerate(4,0,30,3);
motorSpeed(4,30); goFor(3); |
All motors accelerate from zero percent power to thirty percent in three seconds. Then all the motors power output was set to thirty percent then is ran for three seconds. |
| motorSpeed(4,40);
goFor(3); brake(4); |
All motors’ power output is set to forty percent then in ran for three seconds. Then all motor power is stopped. |
| motorSpeed(4,30);
goFor(2); brake(4); |
All motors’ power output is set to zero percent and is ran for two seconds. |
| reverse(4); | All motors’ rotation is reversed. |
| motorSpeed(4,30);
goFor(2); brake(4); |
All motors’ power output is set to thirty percent than is ran for two seconds. Then all motor power is stopped. |