Advanced R&D Lab 1: Coasting vs Power Braking
The goal of the Coasting vs Power Braking lab was to analyze which techniques would be more efficient at different points during the final testing of the AEV, which includes stopping at a gate, picking up a load, and returning in the reverse direction back through the gate with the load. Power braking and Coasting compare in the following ways:
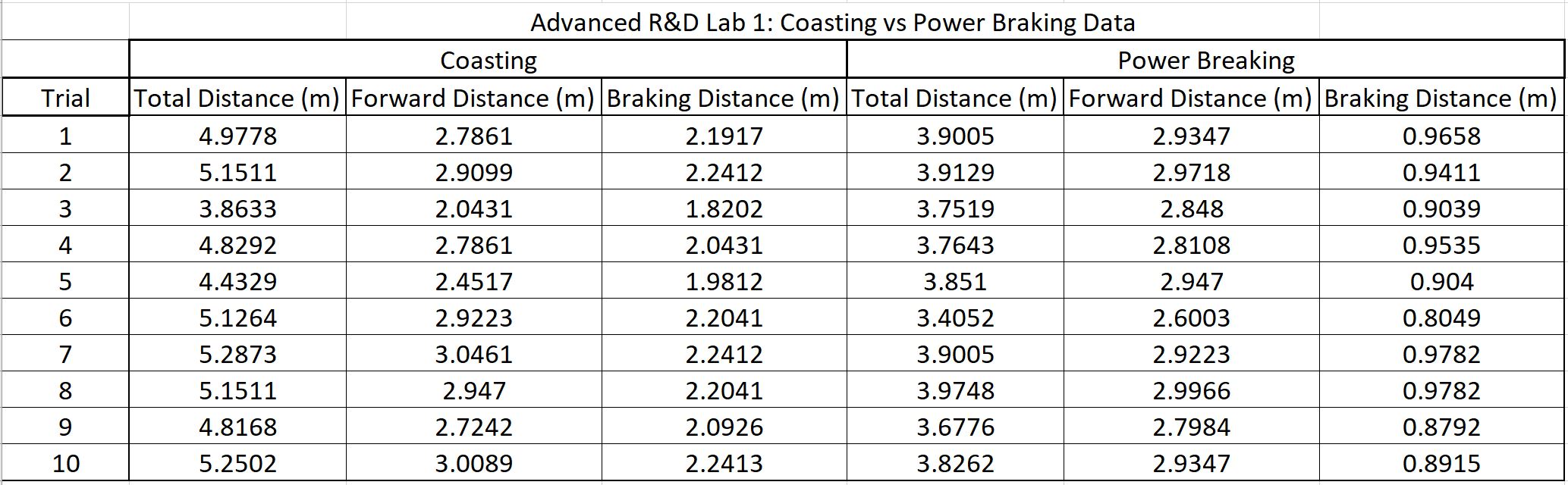
Coasting:
- travels a greater distance after the execution of the “brake” command
- less power is required than power breaking
- distance traveled after the brake command is executed varies more than power breaking, and can vary even more depending on circumstances (traveling down the ramp, traveling up the ramp, having the load attached/ unattached from the vehicle
Power Braking:
- requires the execution of the reverse command followed by motors running for a short amount of time
- as a result of this, more power is required than coasting
- an immediate stop to the vehicle can be implemented (good for stopping at the gate)
Data from the lab trials are found below:

Power consumption of coasting and power braking methods over time

Looking forward, a combination of both power braking and coasting methods will most likely be used during the final test run of the AEV, depending on the circumstances at different phases of the run. For example, power braking will most likely be used to stop at the gate, to stop before the pickup of the load, and returning back to the gate, because these require the AEV to stop at specific points on the track. On the other hand, the coasting method can be used going down the rails in the forward and reverse direction of the track in order to conserve power in multiple ways. This includes not running as much power to the motors because of the momentum the AEV will have going down the rails, as well as a decreased amount of power being used for power braking. By using a combination of both of these braking methods, the maximum energy efficiency for the AEV can be reached in order to decrease energy costs.
Advanced R&D Lab 2: Propeller Configuration
The goal of the Propeller Configuration lab was to analyze which configuration out of four test configurations would be most effective at moving the AEV the farthest distance. There were two methods of propulsion that were tested, push and pull. In the push configuration, the propellers were situated facing the rear of the AEV in order to push the AEV. In the pull configuration, the propellers were situated facing the front in order to pull the AEV. These two configurations were tested with both large and small propellers for a total of four data sets, each configuration was tested with five runs of the AEV. The small propellers proved ineffective in both configurations. The pull configuration was determined to be the best configuration based on the distance traveled, that was much greater that any of the other configurations.
Pull:
- travels a greater distance
- begins motion closer to when the motors start running
Push:
- travels a shorter distance
- motion takes longer to begin after motors begin running
- does not achieve the same speed as the pull configuration

Propeller Configuration in the Pull Configuration

Propeller Configuration in the Push Configuration
Looking forward, a combination of both pull and push configurations will most likely be used during the final test run of the AEV. The push configuration will most likely be used during the portion of the test during which the weight is not attached to the AEV. The pull configuration will be used during the portion of the test that has the weight attached because that will be more effective at moving the weight most efficiently and quickly, and will allow for a successful completion of the test as well as decreasing time and energy costs that factor into the final budget.