Structural Acoustics of Reconfigurable Tessellated Arrays for Acoustic Energy Guiding (Ph.D. Dissertation)
Guided acoustic energies have been widely leveraged in various scientific and engineering fields. The purpose of this research is to guide acoustic energy via reconfigurable tessellated architectures. In this concept, acoustic transducers are mounted on the tessellated facets of origami-inspired structures. Consequently, the folding-induced shape change of origami tessellations directly controls the acoustic wave propagation radiated from the transducers. Compared with conventional digital method, this concept may be more robust in effective energy guiding as well as less complex to implement. In addition, the folding architectures overcome space constraint and facilitate portable systems.

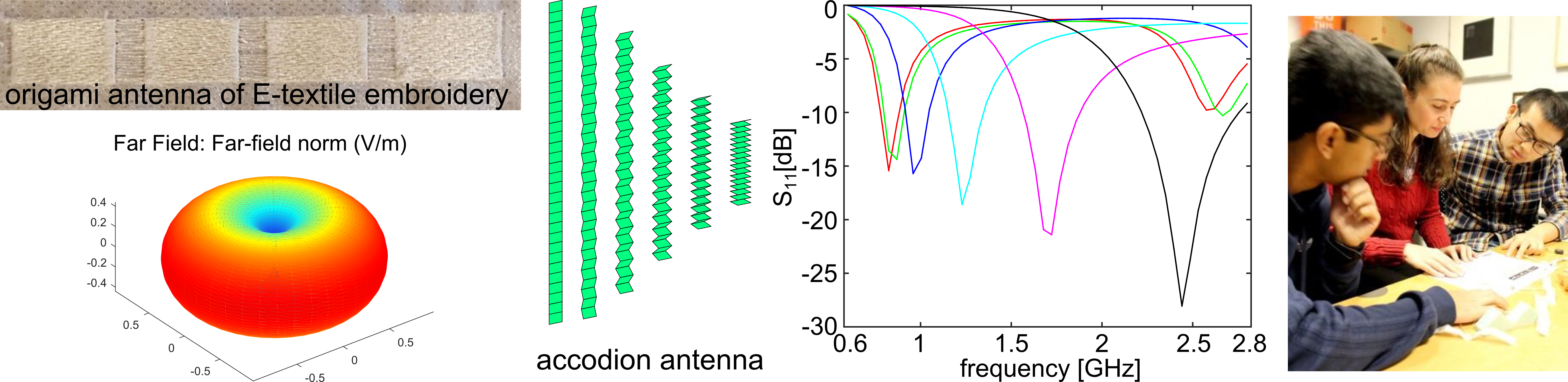
Reconfigurable origami antennas based on E-textile embroidery
This project is a STEAM powered collaboration with Prof. Asimina Kiourti from the Department of Electrical and Computer Engineering at The Ohio State University. The new idea is a reconfigurable e-textile antenna, whose conductive surfaces follow the conformations of origami tessellations. The large shape change enabled by the proposed tessellated antenna is anticipated to result in orders of magnitude tuning of its resonant frequency. As such, the antenna can be integrated into objects as diverse as clothing, toys, and bridges to sense mechanical loads and flexure. The deformations are then unobtrusively monitored via remote broadband antenna to leverage the data for applications, such as human computer interfaces or human performance tracking.
Adaptive vibration control based on Macro Fiber Composites (M.S. Thesis)
The safety of high-performance aircraft is threatened by the flow-induced vibrations of vertical tails whose structural dynamics are time-varying. To suppress the response, adaptive FxLMS algorithm is used for active vibration control with flexible Macro Fiber Composites as actuators. To account for the time-varying characteristics of tails, online modelling of secondary path is employed for real-time implementation. In addition, the step size of the FxLMS algorithm is adaptively adjusted to achieve the balance between control efficiency and system stability. Both numerical and experimental results indicate that this method is able to suppress the vibration response of time-varying systems effectively.