 “Advanced-Pizza-Vehicle” by Colin Williams
“Advanced-Pizza-Vehicle” by Colin Williams
The Advanced-Pizza-Vehicle AEV model is designed to be minimalistic and elegant, yet powerful looking. The overall wedge design featured in the APV AEV expresses these attributes while remaining aerodynamic, lightweight, and efficient. The battery is concealed almost completely underneath the front of the APV AEV, and the 2 motors and propellers are placed equally-spaced on the back of the vehicle. The reason for the “pizza” nomenclature is that the wedge resembles a slice of pizza.

“Life Is About Balance” – Created by Geoffrey Hollis
The concept behind this design was inspired by the problem of balancing the AEV on the rail in order to maximize velocity in a single direction. Balance is also important when considering the pickup. There is no guarantee that the weight is distributed evenly in the cargo. Because of this, a shift in weight could cause the run to end up at the wrong position or at worst come off the tracks. Balance was addressed by making a stable base which was essentially a square with wings cut into it to improve its aerodynamic performance.
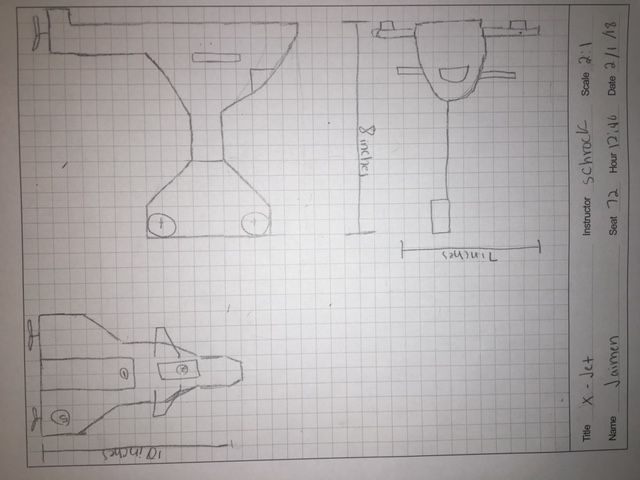
“X -Jet” – Created by Jaimen Hood
This design of the AEV is specifically built for durability along with balance. The AEV is secured with a solid a shell allowing for multiple test that won’t fall victim to serious damage. This is important so that data of the AEV runs are consistent and reliable. This could reduce speed but that is a problem that can be solved with further thought. The balance goes along with the security of the AEV so that it reduces the number of falls that could cause internal damage. The wings towards the front of the AEV help with the balance as well as a the wide base.This is a solid machine with little tolerance for mechanical injury.

“Simplicity” – Created by Saajid Akhter
This design was created with one idea in mind, simplicity. This design uses a simple rectangular base that carries the Arduino control system and 2 electric motors. Along with simple rectangular base the design also uses an L-shaped arm to attach to the rail. On the L-shaped arm there are two wheels, two reflectance sensors (shown with dashed line) and a servo motor. The AEV design functions by using the two electric motors (that are placed on opposite sides of each other) to accelerate or brake to get to the desired location. The servo motor on the arm will also serve as a break since it will have a piece of foam on the end that will rotate up when the AEV is trying to stop. The design maintains the main functions for an AEV, but eliminates any stylistic design choices that may end up as more of a hindrance than a benefit.

Team Concept Sketch
Our final team sketch utilizes aspects of all the above individual sketches in what we found to be a very effective design. The base is made of the 2.5″ x 7.5″ Rectangle, and the 2 motors are supported by 2 trapezoids. The battery is placed underneath the front of the AEV, and the Arduino control system in on top of the back of the AEV. The flat purposefully flat design is to reduce air resistance and create a more aerodynamic vehicle. The magnet that will hold the caboose is supported by two 90° angle brackets. The bracket closest to the caboose will be semi-freely-movable to allow a larger range of motion between the caboose and AEV in order to more effectively move the caboose to different elevations without it possibly disconnecting. The design will likely have a relatively light to moderate weight. The total cost of parts would be approximately $157,920: 1 Arduino, 2 electric motors, 2 count sensors, 2 count sensor connectors, 2 propellers, 1 2.5” x 7.5” rectangle, 2 trapezoids, 1 L-shaped arm, 2 wheels, 1 battery support, 4 brackets, and 2 motor clamps.