Two designs were tested in the first performance test. The designs can be found below.
The code for the two designs can be found below as well as the power vs. distance and power vs. time plots. It was noted that the one push one pull configuration was more efficient. It was decided that the team would move forward using the second design concept due to its efficiency when comparing the two graphs. It was also taken into account that the second design was able to pick up a load easier when it came time to do so.
reverse(1); // sets motor one in reverse
motorSpeed(4, 40); // sets both motors to speed 40
goFor(1.75); // keeps above command for 1.75 seconds
celerate(4,40,10,1.7); // decelerates both motors from 40 to 10 in 1.7 seconds
reverse(4); // sets both motors in reverse
motorSpeed(4, 50); // sets both motors to 50 percent power
goFor(0.9); // keeps current command for 0.9 seconds
brake(4); // stop both motors
motorSpeed(4, 0); // sets both motors to speed 0
goFor(7); // keeps above command for 7 seconds
reverse(4); // sets both motors in reverse
motorSpeed(4, 30); // sets both motors to 30 speed
goFor(3); // keeps above command for 3 seconds

Two Pull Design
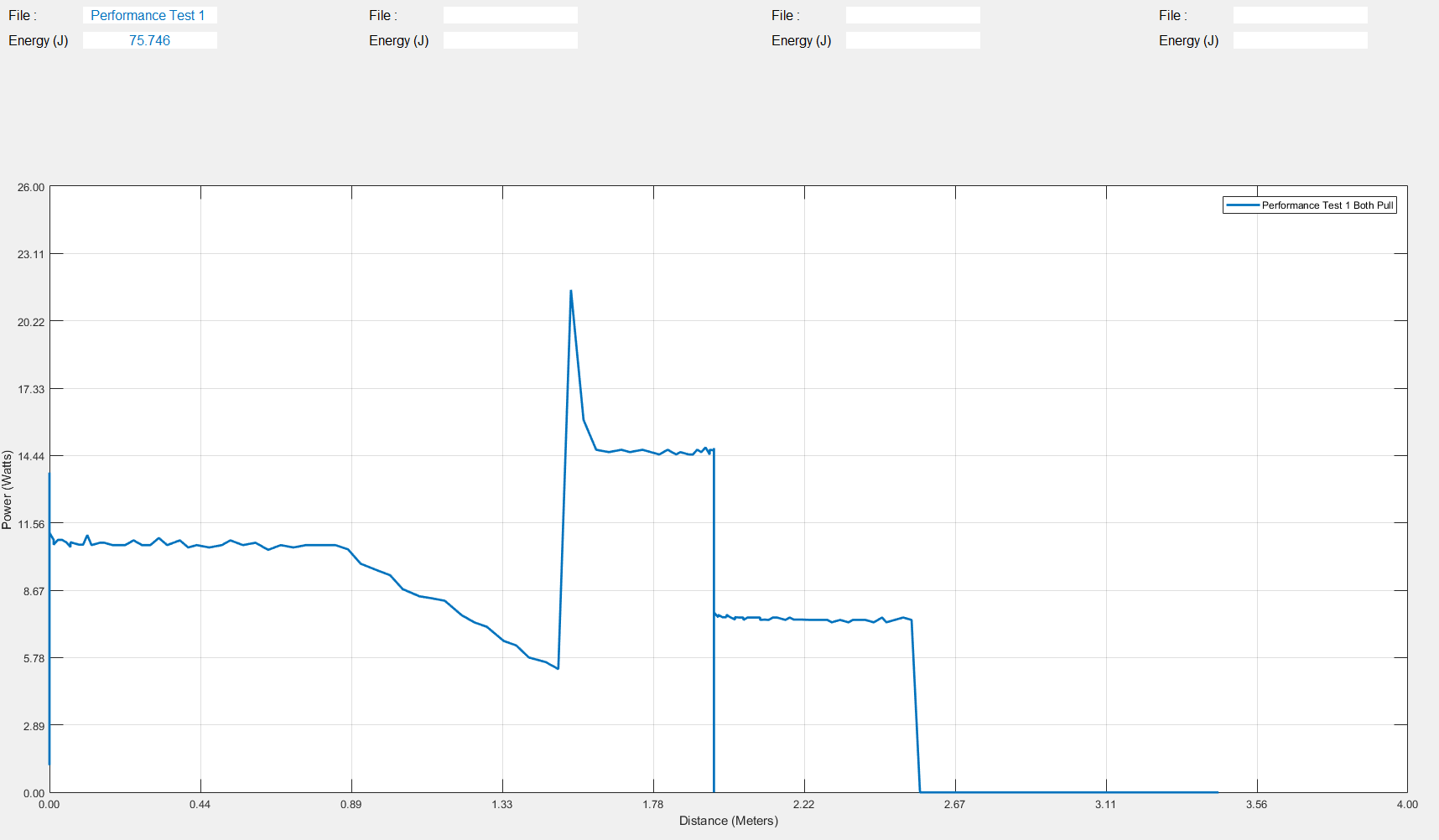
Both Pull Power vs. Distance

Both Pull Power vs. Time

Two Push Design

One Push One Pull Power vs. Distance

One Push One Pull Power vs. Time