In order to prevent backtracking and minimize the total time spent during each run of the course, it is important to decide upon an optimized path early in development. Below is an aerial view of the robot course:
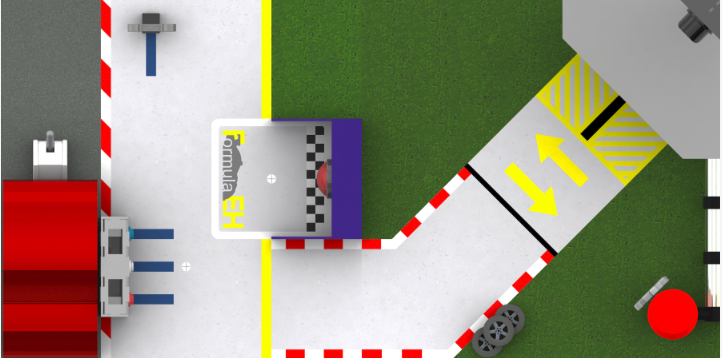
The robot must begin within the confines of the boxed area located at the center of the image. The car jack, wrench, control panel and final button are all present on the same level as the starting zone. At the yellow line is an ascending ramp that the robot must scale in order to deposit the wrench in the garage and turn the fuel crank. The green segments of the course are carpet, representing grass.
The team devised two efficient paths by accounting for potential complications when traversing the course.
Option 1:

While at first glance this route appears inefficient, the primary advantage is that it minimizes the amount of grass the robot must travel across. The effects of the carpet are unknown, and the additional friction can either be harmless or greatly affect the robot’s ability to ascend the ramp. The robot is also more likely to travel faster on the smooth pavement.
This path allows the robot to obtain the wrench and potentially use it to flip the jack and push the appropriate buttons at the control panel, travel up the paved segment to the garage to deposit the wrench, turn the fuel crank, and push the final button at the end of the course. Additionally, the order of tasks completed by the robot allows for the RPS to be activated before traveling up the incline. Overall, this path opens the door for a variety of approaches and designs.
Option 2:

This path is more straightforward, and assuming the robot can effortlessly travel up the grassy incline, is more efficient than the former. This alternative path also allows the robot to activate the RPS before traveling up to the garage. It then raises the car jack before grabbing the wrench and immediately travels up the grassy incline to deposit the wrench in the garage. It then turns the wheel before traveling back down the pavement to push the final button. This alternative route is even more efficient and completely eliminates backtracking, but relies on an important assumption.
In order to utilize Option 2, the robot will need semi-powerful motors to overcome the additional friction. Option 2 is the preferred route and will be used assuming the motors are powerful enough; otherwise, Option 1 will be considered as a strong backup.