During AR&D our team researched how to best implement the reflectance sensors and the configuration of the motors.
Reflectance Sensors:
The main factor we tested with the reflectance sensors was what distance is optimal for measuring the marks. Starting from about 1 inch away from the sensor we measured if it could pick up on the wheel spinning. The wheel would be held up by a nut twisted onto a screw. For each trial we would spin the wheel and see if the serial monitor would pick up the signal. If it didn’t, we would twist the nut one revolution closer (about 5/100ths of an inch) and try again. We continued this will no response until about 2/10ths of an inch distance between the sensor and the wheel. This represents the maximum distance they wheel can be from the sensor to operate. This data is important because the mark readings from the sensor are very useful to be able to operate the AEV at its full potential. With faulty readings you wouldn’t be able to use functions like goToAbsolutePosition or goToRelativePosition. Finding this optimal distance also means that there are some additional building restraints that need to be applied, limiting the positioning of the wheels with respect to the sensors, and the thickness of any custom arm pieces.


Motor Configuration:
The main thing we tested with the motor configuration was push vs. pull. Using the same build and orientation of the AEV, we tested the motors pushing the AEV in one direction, then switched the motors’ polarity to pull the AEV in the other direction.Motor Configuration:


As shown in the graphs, the pushed vehicle went farther in the same amount of time than the pulled vehicle did. This led us to conclude that pushing the AEV with the propellers is more energy efficient than pulling. This data could be different for different designs. Our propellers were directly behind a big base of the AEV. This base could have interfered with the airflow in the pull direction which could result in it being slower, further testing would need to be conducted. Motor configuration is important because the placement, orientation, and other aspects of the motors affects how well the propellers do their job. Finding the most optimal use of the motors will greatly impact the performance of the AEV and energy use. Some aspects of motor configuration that still need more looking in to would be how physical placement on the AEV affects motor efficiency (front vs. back), and how weight of the vehicle impacts motor efficiency.

Motor Energy Consumption:
The single drive configuration relies heavily on the motor. Thus, Group B’s single drive AEV tested the change in energy consumption of the motor polarity.
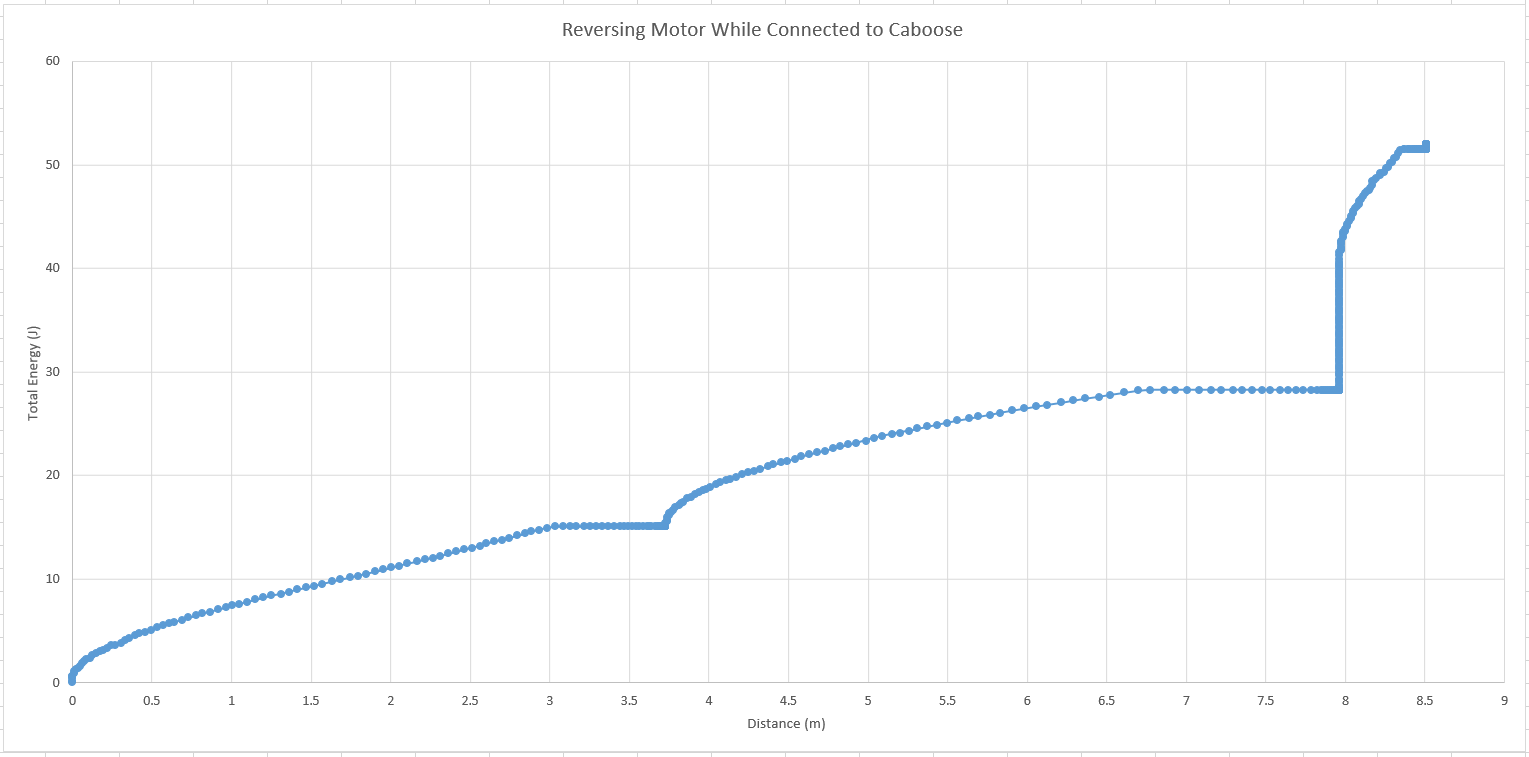
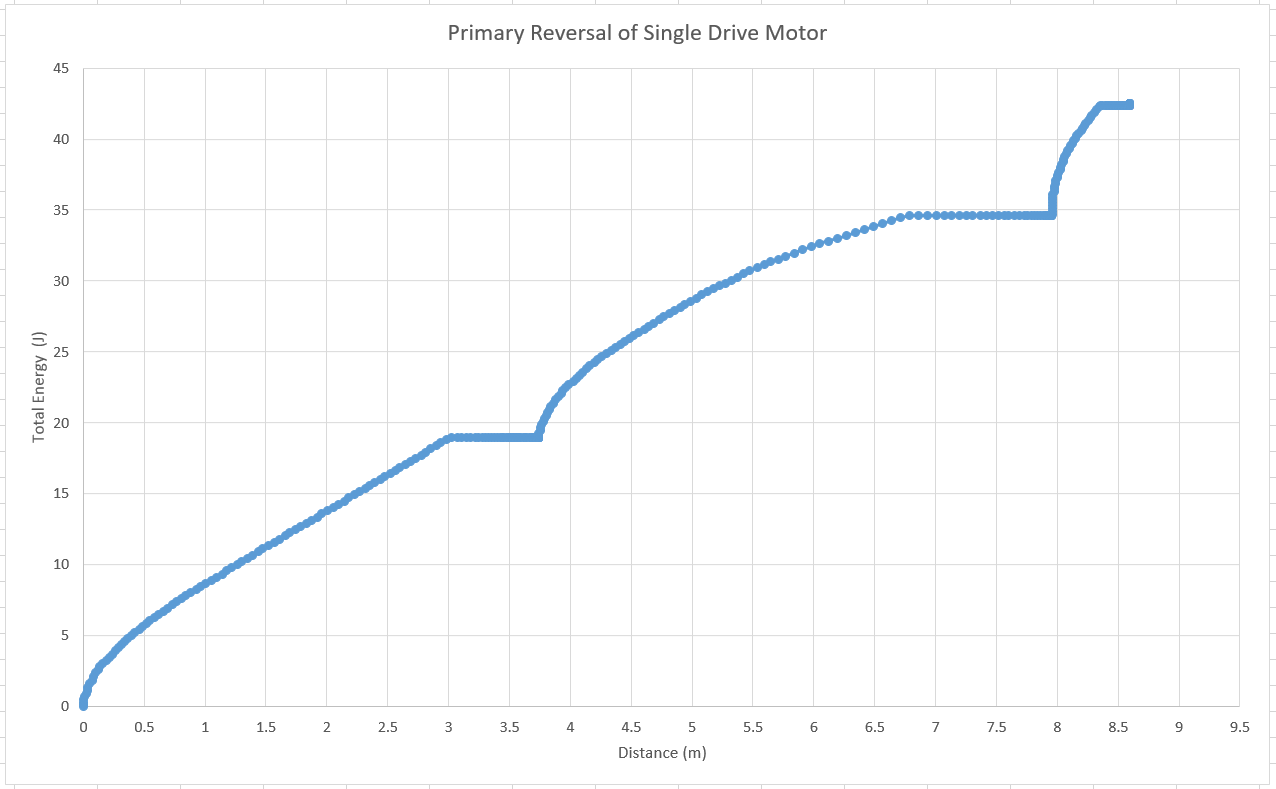
From the two runs, two graphs were created that illustrate the differences in energy consumption from different motor polarities. The first test tested the AEV motor under normal motor polarity until they were reversed to pick up the caboose. The second test reversed the AEV motor until it collected the caboose. The second test uses significantly less energy than the first test proving how reversing the normal polarity of the motor plus the added weight of the caboose greatly increases the energy consumption of the AEV.