Programing Basics
Glossary of Basic Function Calls
celerate(m,p1,p2,t): Changes the speed of specified motors (m) from initial speed (p1) to final speed (p2) in a specified time in seconds (t)
motorSpeed(m,p): Sets the speed of specified motors (m) at the specified power (p)
goFor(t): Runs the motors at their current power for a specified time in seconds (t)
brake(m): Stops the motors (m) from spinning
reverse(m): Reverses the direction of specified motors (m)
goToRelativePosition(n): Continues to run the motors until the AEV reaches the specified position (n) relative to its previous position
goToAbsoultePostition(n): Continues to run the motors until the AEV reaches the specified position (n) relative to the original position
Reflectance Sensors:

The purpose of the reflective sensor is to track the distance the AEV has traveled. It does this through detecting each time the reflective tape on the wheel completes a single revolution. It is essential to have it as a part of it, otherwise the AEV would not have any indication of the distance it has traveled.
Creative Design Thinking:



Kenneth’s Design Sidd’s Design Andrew’s Design

Final Team Design
The final design would be successful due to several factors. The first concern tackled in the design was the weight of the AEV. It was determined and agreed that the T shaped frame would cut out an amount of excess weight for the AEV. The second detail that is crucial to the design is the style and spacing between the propellers, as we believed spacing them out and providing them with a more sleek frame to be attached to would benefit the overall AEV energy expenditure.
Data Analysis Tool:
Power vs. Time

Power vs. Distance

Energy vs. Time

Energy vs. Distance

Concept Screening and Scoring:
Screening Matrix
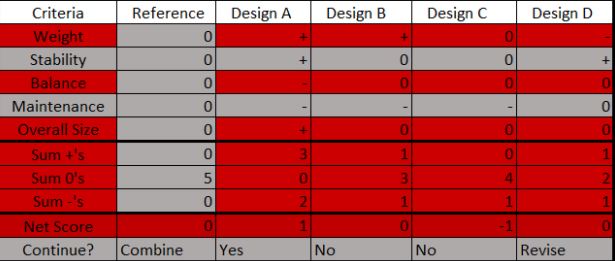
Scoring Matrix

Track Variance:
Calculated Statistics:

All 4 tracks have similar distances traveled, which makes sense because the same program was used on all tracks. The first 3 tracks have comparable averages for time and energy required to travel the distance. The mean energy required was higher for Track 4, so it will be less efficient to run the AEV on Track 4. There was little variation in the data for each individual track, demonstrated by the low standard deviations for all variables.