Our main consideration when making our final concept sketch was to keep our solution cheap. After deciding that ourprimary user base would be college students, we found that this would be huge in getting them to use our product. Along with this, we found that other options were quite expensive meaning that this would target our users well. This influenced our decision to make our transportation vehicle autonomous. By doing this, we could lower the overall cost of delivery by not having to hire somebody to operate the vehicle. We were also looking to make it convenient and accessible, which making it a vehicle allows us to do. By addressing these, we can reach more people including those with disabilities.
The idea behind our prototype was to see how capable a vehicle controlled autonomously could be stopped and avoid accidents. To do this, we designed a simple prototype that would run on a rail and be moved by propellor. Our code consisted of our robot moving forward, stopping, “making a delivery”, and then returning.
This is our Final Concept Sketch:

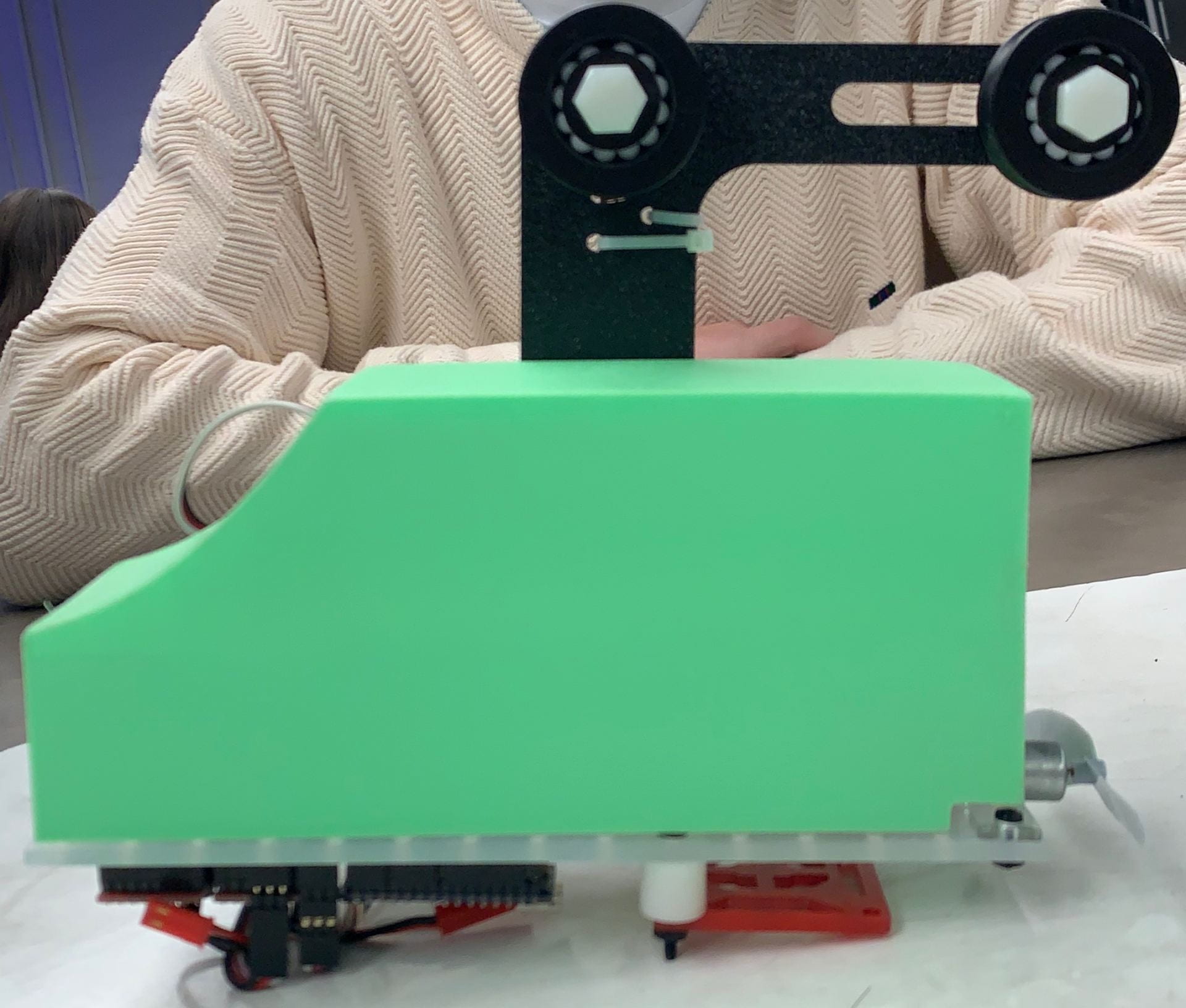
And here is our final Prototype:


Sample Code:
//Test sensors
//reflectanceSensorTest();
//Delivery Distance
int firstDelivery = 120;
//Measure the distance forward
int forwardDistance = 0;
//Measure the distance backwards
int backwardDistance = 0;
//Time required to reload and drop off
int loadingTime = 5;
//First delivery
//Keep moving at power 30 forwards until distance is firstDelivery
motorSpeed(1,-80);
pauseFor(2.5);
while(backwardDistance < firstDelivery){ motorSpeed(1,-25); backwardDistance = getForwardCounts(); } motorSpeed(1,35); pauseFor(2.5); motorSpeed(1,0); pauseFor(loadingTime);