Home of the Indefatigable!
Welcome to team Jasper’s portfolio on the AEV lab! The purpose of this lab was to construct and program an automatic vehicle transport to carry a cart along a track utilizing different sensors and programming techniques to create the most energy efficient model as possible!
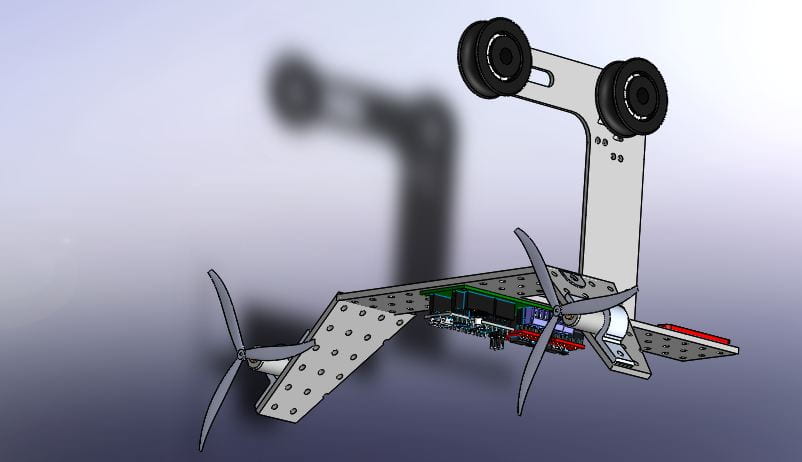
The Indefatigable AEV design utilizes a puller-configuration and features several design applications to help create the most energy efficient model as possible. The first of these design implementations would be the centralization of weight and balance along the body of the AEV. This design was drafted to maintain its balance and control on the track to remove the possibility of the AEV derailing from the track. This was accomplished by mirroring the propeller layout and wing layout on both sides, as well as distributing the servo motor, Arduino motherboard, monorail clamp, and battery back between both front and back of the AEV. This created an equilibrium of weight distribution which helped ensure the vehicle would stay on the track. Another important design implementation would be the condensed body the AEV utilizes. The body of the vehicle is light and small, allowing for a much more energy efficient build while the AEV travels uphill. Finally, the AEV features a hook drilled into the servo motor fin, bent into a lock as to remove the possibility of the hook detaching itself. This design allows for the AEV to pull the cart without breaking or removing the hook from the AEV, stranding the passenger cart.
The programming of the AEV also features several key implementations which occur as a consequence to the design of the AEV. The main implementation being the use of celerate commands to maintain the AEV on inclines. Utilizing slight changes in speed while moving uphill, the AEV can completely stop itself on an incline without the use of a brake system. By maintaining a constant speed which neutralizes the pull of gravity, the AEV can remain perfectly still while on an incline. Since the AEV has only propellers to affect its speed and braking system, the use of the celerate was a key influence in the creation of a program which could accommodate the restrictions.
Linked below is a video of the AEV, Indefatigable, traversing the full track while transporting a passenger cart: